the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 22 Jul 2025
| 22 Jul 2025
Using Monte Carlo conformal prediction to evaluate the uncertainty of deep-learning soil spectral models
Yin-Chung Huang
José Padarian
Budiman Minasny
Alex B. McBratney
Uncertainty quantification is a crucial step in the practical application of soil spectral models, particularly in supporting real-world decision making and risk assessment. While machine learning has made remarkable strides in predicting various physiochemical properties of soils using spectroscopy, its practical utility in decision making remains limited without quantified uncertainty. Despite its importance, uncertainty quantification is rarely incorporated into soil spectral models, with existing methods facing significant limitations. Existing methods are either computationally demanding, fail to achieve the desired coverage of observed data, or struggle to handle out-of-domain uncertainty. This study introduces an innovative application of Monte Carlo conformal prediction (MC-CP) to quantify uncertainty in deep-learning models for predicting clay content from mid-infrared spectroscopy. We compared MC-CP with two established methods: (1) Monte Carlo dropout and (2) conformal prediction. Monte Carlo dropout generates prediction intervals for each sample and can address larger uncertainties associated with out-of-domain data. Conformal prediction, on the other hand, guarantees ideal coverage of true values but generates unnecessarily wide prediction intervals, making it overly conservative for many practical applications. Using 39 177 samples from the mid-infrared spectral library of the Kellogg Soil Survey Laboratory to build convolutional neural networks, we found that Monte Carlo dropout itself falls short in achieving the desired coverage – its 90 % prediction intervals only covered the observed values in 74 % of the cases, well below the expected 90 % coverage. In contrast, MC-CP successfully combines the strengths of both methods. It achieved a prediction interval coverage probability of 91 %, closely matching the expected 90 % coverage and far surpassing the performance of the Monte Carlo dropout. Additionally, the mean prediction interval width for MC-CP was 9.05 %, narrower than the conformal prediction's 11.11 %. The success of MC-CP enhances the real-world applicability of soil spectral models, paving the way for their integration into large-scale machine learning models, such as soil inference systems, and further transforming decision making and risk assessment in soil science.
- Article
(1199 KB) - Full-text XML
- BibTeX
- EndNote




In the recent developments of soil science, machine learning has been widely used in applications such as soil spectroscopy, proximal sensing, carbon stock modelling, and digital soil mapping (Ng et al., 2019; Wadoux et al., 2020). These studies are characterised by the use of large soil datasets and require an efficient way of extracting information to predict target attributes. Hence, machine learning is favoured because these algorithms can generate prediction models with high accuracy for various purposes (Padarian et al., 2020; Minasny et al., 2024). For example, in soil spectroscopy, visible and near-infrared (Vis-NIR) and mid-infrared (MIR) spectroscopy has been used with machine learning to predict soil properties such as soil organic carbon (SOC), texture, and cation exchange capacity (CEC). Padarian et al. (2019) applied convolutional neural networks (CNNs) to predict soil properties with Vis-NIR spectra, using the European Land Use/Cover Area Frame Statistical Survey (LUCAS) dataset, which contained about 20 000 samples. In the SOC prediction of their study, the multi-task CNN outperformed conventional algorithms, such as partial least-squares (PLS) regression and Cubist, by reducing the root mean square error (RMSE) by more than 60 %. Additionally, Ng et al. (2019) used the Kellogg Soil Survey Laboratory (KSSL) database with around 15 000 samples from the United States (US) with both Vis-NIR and MIR spectra to build a multi-task CNN. Their model achieved a coefficient of determination (R2) of over 0.90 for total carbon, SOC, CEC, clay, sand, and pH.
Despite the significant success of machine learning in predicting soil properties, uncertainty quantification of the prediction remains an underexplored area in soil spectroscopy (Omondiagbe et al., 2024). The growing demand for practical applications of soil spectral models requires users to know the uncertainty accompanying the model prediction in order to assess the quality of the predictions (Bellon-Maurel et al., 2010). Additionally, deep learning (DL), as a branch of machine learning, is increasingly being applied to soil science to explore its ability to extract information from large datasets. In the data-intensive context of deep learning, uncertainty analysis is critical in evaluating models for decision making and risk management, and predictions without uncertainty are neither practicable nor applicable (Begoli et al., 2019). Hence, it is crucial to establish an effective way of evaluating the uncertainty of machine learning models.
An ideal uncertainty quantification method is expected to satisfy the following criteria:
-
The method is computationally efficient.
-
The prediction interval coverage probability (PICP) must meet the expected coverage. That is, p% coverage is expected for a p% prediction interval, with the narrowest mean prediction interval width (MPIW).
-
The prediction intervals should be able to address the greater uncertainty for samples significantly different from the training set (i.e. out-of-domain samples).
Several methods have been used to generate intervals for each prediction to characterise uncertainty. One commonly used approach is bootstrapping, in which several models are trained with subsets generated by drawing samples with replacements from the same dataset (Efron and Tibshirani, 1994). The mean of all the models is considered the final prediction, and an interval can be derived from the quantiles of multiple predictions. However, one drawback of bootstrapping is the time-consuming nature of training numerous bootstrapping models. In addition, bootstrapping primarily addresses the model uncertainty and derives confidence intervals rather than prediction intervals (Heuvelink, 2014; Wadoux, 2019). A comprehensive uncertainty quantification using methods such as Markov chain Monte Carlo can better evaluate the parameter uncertainty involved in the model (Minasny et al., 2011).
The diverse nature of models enabled the development of different methods. For example, quantile regression (QR) uses a set of regression models to estimate the quantile of target variables, and the prediction interval can later be defined by the upper and lower quantiles (Kasraei et al., 2021). Additionally, quantile regression forests (QRFs) and quantile regression neural networks (QRNNs) are extensions of quantile regression that apply similar principles to generate prediction intervals (Schmidinger and Heuvelink, 2023). Heuvelink et al. (2021) utilised QRFs to predict the SOC for soils in Argentina with quantified uncertainty, and the 0.05 and 0.95 quantiles were used to generate the 90 % prediction interval. However, QR is not yet available for every DL model. On the other hand, Omondiagbe et al. (2024) compared bootstrapped PLS, generalised additive models (GAMs), and Bayesian CNNs for their ability to quantify uncertainty. They found that GAMs and Bayesian CNNs outperformed bootstrapped PLS by having a PICP close to the ideal 90 % value. Moreover, the MPIW of Bayesian CNNs is mostly lower than that of GAMs, suggesting a more accurate estimation of uncertainty (Omondiagbe et al., 2024). However, Bayesian neural networks are more intensive in computation compared to standard CNNs (Bethell et al., 2024; Omondiagbe et al., 2024).
An alternative method for evaluating model uncertainty in DL is Monte Carlo dropout (MC dropout) by Gal and Ghahramani (2016), in which a CNN model is trained with multiple dropout layers that randomly deactivate neurons during prediction, resulting in different predictions across iterations. Multiple predictions from a single MC dropout CNN model form a distribution, and prediction intervals can be obtained by assessing the quantiles of the predictions. This approach reduced the training time compared to bootstrapping.
The performance of bootstrapping and MC dropout was compared by Padarian et al. (2022), in which CNN models were trained to predict SOC with Vis-NIR spectra using the LUCAS dataset through (1) 100 times bootstrapping and (2) MC dropout. Additionally, CNN models were trained on mineral soils with a threshold of < 20 % SOC and then tested separately on in-domain data (mineral soils, SOC < 20 %) and out-of-domain data (organic soils, SOC > 20 %). This was to test the model's response to samples significantly different from the training set. A good uncertainty quantification should indicate the larger uncertainty when predicting out-of-domain data. When facing in-domain data, both bootstrapping and MC dropout generated reasonable prediction intervals. However, when facing out-of-domain data, the prediction interval of MC dropout increased significantly compared to bootstrapping, indicating that the uncertainty increased when the testing samples were markedly different from the training data. In other words, the model was aware of its uncertainty for out-of-domain data and can reflect this situation by generating a wider prediction interval. Such analysis is particularly useful when assessing risk management, as predictions with higher uncertainty must be treated cautiously. However, both bootstrapping and MC dropout underestimated the uncertainty and were overconfident in their study. The 90 % PICP of bootstrapping and MC dropout in their study were both under 80 %, while the expected coverage was 90 %. This was not practical in real-world situations and left room for improvement.
A relatively easy method for generating prediction intervals with expected coverage is conformal prediction (CP), which uses an independent calibration set to estimate the prediction interval and can be performed on any model (Shafer and Vovk, 2008). CP can therefore be integrated with methods such as QR and MC dropout. Kakhani et al. (2024) utilised CP to generate prediction intervals for SOC mapping in Europe with the LUCAS dataset and found that CP outperformed other methods by generating the most accurate PICP and a reasonably sized prediction interval. Singh et al. (2024) applied CP with ML in Earth observation data, and CP successfully generated prediction intervals of canopy height. Despite these advantages, a key limitation of CP is its inability to generate sample-specific prediction intervals. Instead, it produces a uniform interval for all samples. In other words, CP does not account for increased uncertainty in out-of-domain samples. As a result, CP is known as a conservative method that provides overly broad prediction intervals. This empirical method is similar to the UNEEC (uncertainty estimation based on local errors and clustering) method of Solomatine and Shrestha (2009). UNEEC derived upper and lower prediction intervals based on the distribution of model errors grouped by predictors. Malone et al. (2011) modified the UNEEC method to deal with out-of-domain predictions using fuzzy k-means with extra grades. However, as with CP, the method is highly dependent on the training data. Consequently, no uncertainty quantification method applied in soil spectroscopy has combined computational efficiency, expected coverage with a narrow MPIW, and the ability to address out-of-domain uncertainty.
In this study, we applied Monte Carlo conformal prediction (MC-CP), a method introduced by Bethell et al. (2024) to improve the PICP of MC dropout while maintaining its advantages in characterising out-of-domain uncertainty. Also known as conformalised Monte Carlo prediction, MC-CP not only retains the structure of the MC dropout to generate different prediction intervals for each sample but also extends the prediction interval with CP to achieve the expected coverage. In other words, MC-CP can ensure expected coverage while accounting for the uncertainty associated with each sample. Bethell et al. (2024) demonstrated the effectiveness of MC-CP in both regression and classification tasks using benchmark datasets and showed that MC-CP was significantly improved from the original MC dropout. Hence, MC-CP is a promising method for soil science and can address the uncertainty involved in prediction using DL models.
This study aimed to explore the use of MC-CP as a potential method for quantifying the uncertainty of DL models in soil spectroscopy. Specifically, the goal was to validate whether MC-CP preserves the advantages of both MC dropout and CP. Therefore, the objectives of this study are to (1) test whether MC-CP can generate prediction intervals that reach the expected PICP and (2) evaluate whether MC-CP can address the uncertainty of out-of-domain samples.
2.1 Dataset
The soil samples from the KSSL dataset were used in this study. They contained the MIR spectra and physiochemical properties of over 17 000 soil profiles and 70 000 soil samples across the US (Soil Survey Staff, 2014). Soil clay content was selected as the target variable to predict with MIR spectra in this study, as the prediction of clay has been a well-established method for MIR spectroscopy (Seybold et al., 2019; Ng et al., 2022). The database contains 45 339 samples which have measured MIR spectra and particle size analyses. Since the spectra of mineral and organic soils behave differently, samples with SOC > 10 % were excluded, resulting in the removal of 1808 samples. Additionally, extreme values for clay content were filtered by excluding data below the 5th percentile and above the 95th percentile, further removing 4354 samples. This resulted in a total number of 39 177 samples.
Here we created a model based on the in-domain data, and a threshold of 40 % clay content was chosen to separate the in-domain and out-of-domain samples. A clay content of 40 % is the minimum threshold for a soil to be classified as “clay” according to the US Department of Agriculture's soil texture classification (Soil Science Division Staff, 2017). Using this criterion, approximately 10 % of the samples were categorised as out-of-domain (clay > 40 %, N= 3686), while the remaining in-domain samples had a clay content below 40 % (N= 35 491). The in-domain samples would be used for model training, validation, and testing. The in-domain data were further randomly separated into 85 % training, 5 % validation, 5 % calibration for conformal prediction, and 5 % testing. Only the training and validation data were used in building the model. The out-of-domain samples were not involved in any of the training processes and were only used to test the performance of models when facing out-of-domain situations.
The MIR spectra in the range 4000–600 cm−1 were used to predict the clay content. The full procedure of MIR spectral analysis can be found in the Soil Survey Staff (2014) manual. No other pre-processing was applied to the raw spectra, as it has been proven that CNNs are able to deal with spectra without pre-processing (Ng et al., 2019; Padarian et al., 2019). To train the CNN model, the clay contents were scaled to a range of 0–1 using the maximum and minimum of the training set (see Sect. 2.3).
2.2 Uncertainty quantification methods
2.2.1 Monte Carlo dropout (MC dropout)
MC dropout was introduced by Gal and Ghahramani (2016) based on dropout layers, which are commonly used in DL models to prevent overfitting (Srivastava et al., 2014). In each dropout layer, a certain portion of the neurons is randomly deactivated (weights set to zero) during both training and testing. By randomly dropping neurons and their connections, the dropout layer helps prevent the model from overfitting the training dataset. As a result of the dropout layers, each prediction result is different, and multiple predictions generate a distribution. Gal and Ghahramani (2016) demonstrated that MC dropout can be used to approximate Bayesian inference in deep Gaussian processes, and the standard deviation of the prediction can thus be used to assess the uncertainty (Bethell et al., 2024). For a detailed rationale, readers are referred to the paper by Gal and Ghahramani (2016).
In practice, a CNN model with dropout layers was trained and performed 100 forward passes with dropout layers activated to generate a predictive distribution (Bethell et al., 2024). In Eq. (1), Xi represents an individual input sample. The 90 % prediction interval of the MC dropout (CMC,90) of each sample i would be defined by the 5th quantile ()) and the 95th quantile ()) of the predictions (Eq. 1):
2.2.2 Conformal prediction (CP)
CP is a model-agnostic method, which means that it can be used to evaluate the uncertainty of any model (Shafer and Vovk, 2008). Consider to be pairs of features (inputs) and responses (outputs), where α is the desired error level. A regression model f is constructed using the training dataset, and f(Xi) is the prediction of the observed value Yi. The goal is to generate prediction intervals C(Xi) such that the probability of the observed value Yi being contained within C(Xi) is approximately 1−α (Angelopoulos and Bates, 2022). The procedure can be separated into three steps:
-
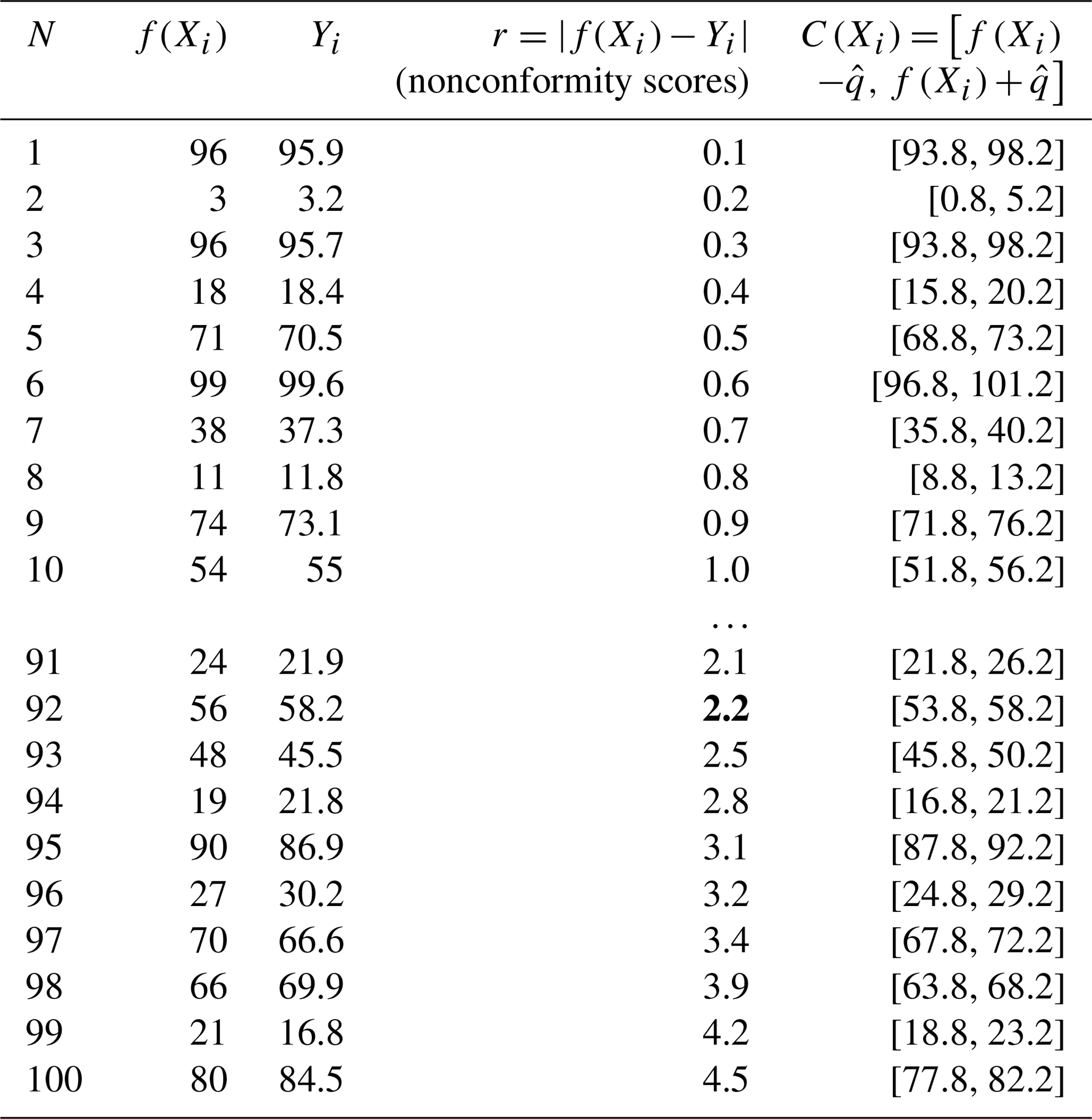
Start with nonconformity scores. The nonconformity measure is the foundation of CP, which quantifies the difference between the predicted values and the observed values (Shafer and Vovk, 2008). In a regression scenario, the nonconformity measure is typically defined as the absolute value of residuals . Here, ri represents the nonconformity scores of the ith data point. The first step is to calculate these nonconformity scores using a calibration dataset and rank the nonconformity scores from low to high. Table 1 shows an example dataset of 100 samples with ri in the order from minimum to maximum.
-
Get the adjusted quantile. Using the ranked nonconformity scores, CP computes the adjusted quantile to determine the prediction interval. Specifically, it selects the th quantile of the nonconformity scores ri as . The ⌈⌉ symbol indicates the ceiling function, and this equation corrects the quantile for the size of the calibration dataset (Angelopoulos and Bates, 2022). In the example, if we set α=0.1 with a total of 100 samples, will be the 92nd quantile of ri, which is 2.2 (marked as bold in Table 1).
-
Generate prediction intervals. The prediction intervals are constructed as in Eq. (2):
The width of each prediction interval is fixed to 2 times the value of , centred around the model prediction f(Xi). In the example from Table 1, the prediction interval covers the observed values from samples 1 through 92, indicating that 92 % of the samples are covered within the prediction interval. This will be applied to the test set to generate prediction intervals for unknown data. The key advantage of CP is that it can be applied to any model regardless of correctness, assumptions, or structure of the model while providing guaranteed coverage for the specified confidence level (Angelopoulos and Bates, 2022). However, the fixed interval width for all of the data points and the guaranteed coverage also make CP an overly conservative method that generates unnecessarily wide intervals (Bethell et al., 2024).
Table 1Example dataset of conformal prediction containing 100 samples. The nonconformity scores are ranked from minimum to maximum.
2.2.3 Monte Carlo conformal prediction (MC-CP)
MC-CP is a novel uncertainty quantification method developed by Bethell et al. (2024). As its name suggests, MC-CP combines MC and CP to estimate uncertainty. Instead of using CP to generate a prediction interval, MC-CP extends the prediction interval from an MC method. The original paper by Bethell et al. (2024) used deep quantile regression to generate prediction intervals, while this study introduces the CNN with dropout layers. The CNN model with dropout layers was trained in the same way as the MC dropout method to predict the calibration set 100 times. For each sample i in the calibration set, the 5th quantile ( and the 95th quantile ( of the 100 predictions are calculated, and the nonconformity score Ei is defined as in Eq. (3):
According to Eq. (3), the nonconformity scores are calculated as the largest distance between the observed value and the boundary of the MC dropout interval. The th quantile of the nonconformity score Ei will then be selected as . The adjusted prediction interval of MC-CP will be calculated as in Eq. (4):
In MC-CP, the prediction interval of the MC dropout method will be extended by 2 times . For unknown testing data, the prediction interval will first be calculated in the same way as the MC method and then extended by 2 times , which is calculated from the calibration set. This will result in sample-dependent prediction intervals, guaranteed coverage, and less conservative intervals than CP.
2.3 Model architecture and training data
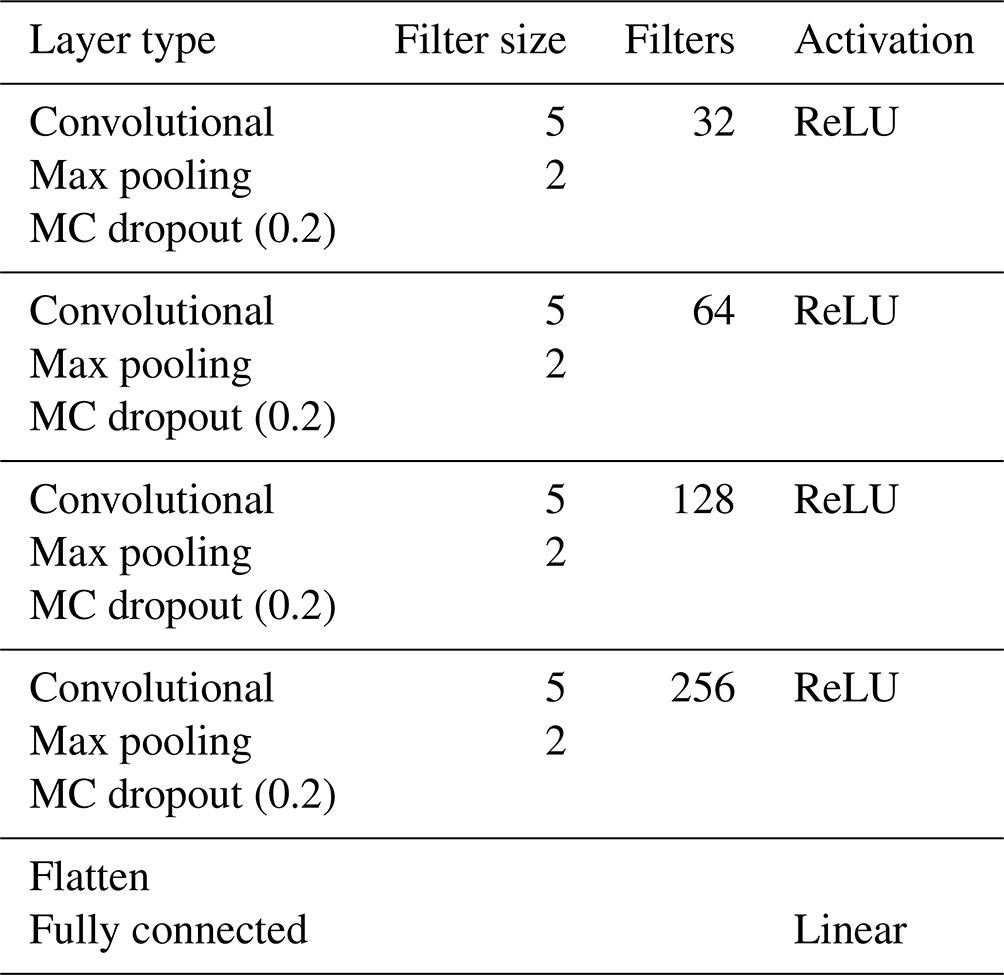
A 1D CNN was constructed with five trainable layers, i.e. four convolutional layers and one fully connected (dense) layer. A detailed description of the layers is presented in Table 2. A fixed filter size of five was used for all of the convolutional layers, and the filter size for the max-pooling layer was fixed at two. The number of filters started at 32 and increased to 256. Every convolutional layer was followed by a max-pooling layer and an MC dropout layer, resulting in a total of four dropout layers with a fixed 20 % dropout rate. Dropout rates, including 10 %, 20 %, and 30 %, were tested and optimised. The network was trained with a batch size of 300, a maximum number of epochs of 500, and early stopping on the validation set, with a patience of 60. The initial learning rate was set to 0.001, and the learning rate reduction factor was set to 0.1, with a patience of 50. These hyperparameters were also tested and optimised for this dataset. All of the analyses were performed in Python v3.12.3 using Tensorflow v2.16.1 (Abadi et al., 2015; Python Software Foundation, 2024).
Table 2Architecture of the convolutional neural network. ReLU stands for rectified linear unit.
2.4 Model evaluation
The model performance was evaluated using the coefficients of determination (R2, Eq. 5) and RMSE (Eq. 6) (Ng et al., 2022):
The results of the uncertainty quantification were evaluated using the PICP (Eq. 7) and the MPIW (Eq. 8) following Shrestha and Solomatine (2006):
where n is the total number of observations and j is the number of samples for which the observed value yi is covered in the prediction interval. and are the lower and upper bounds of the prediction interval of the ith sample. PICP calculates the proportion where the true value is covered by the interval, while MPIW calculates the average length of the prediction intervals.
3.1 Model performance
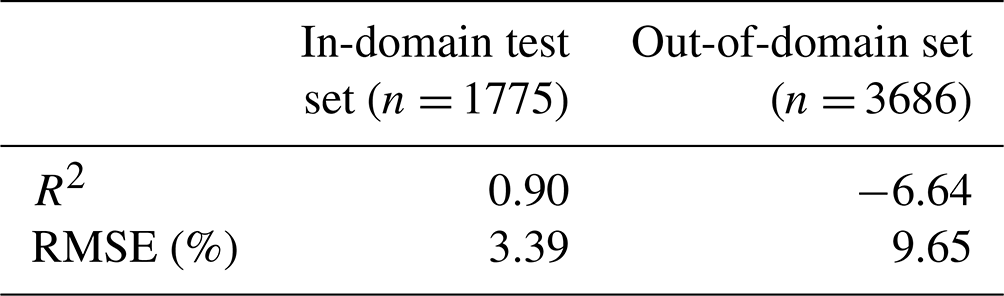
The DL model demonstrated good performance in predicting the clay content of the in-domain test set (clay < 40 %), with R2 0.90 and RMSE 3.39 % (Table 3). The results were comparable to those of the multi-task CNN models of Ng et al. (2019), which used part of the current dataset. For out-of-domain samples, a negative R2 value indicates that the model performs worse than simply using the mean prediction (Fig. 1; Table 3). Such a result for out-of-domain samples was expected, as the model lacked knowledge of soils with clay content exceeding 40 %, resulting in most out-of-domain predictions falling below 40 % clay.
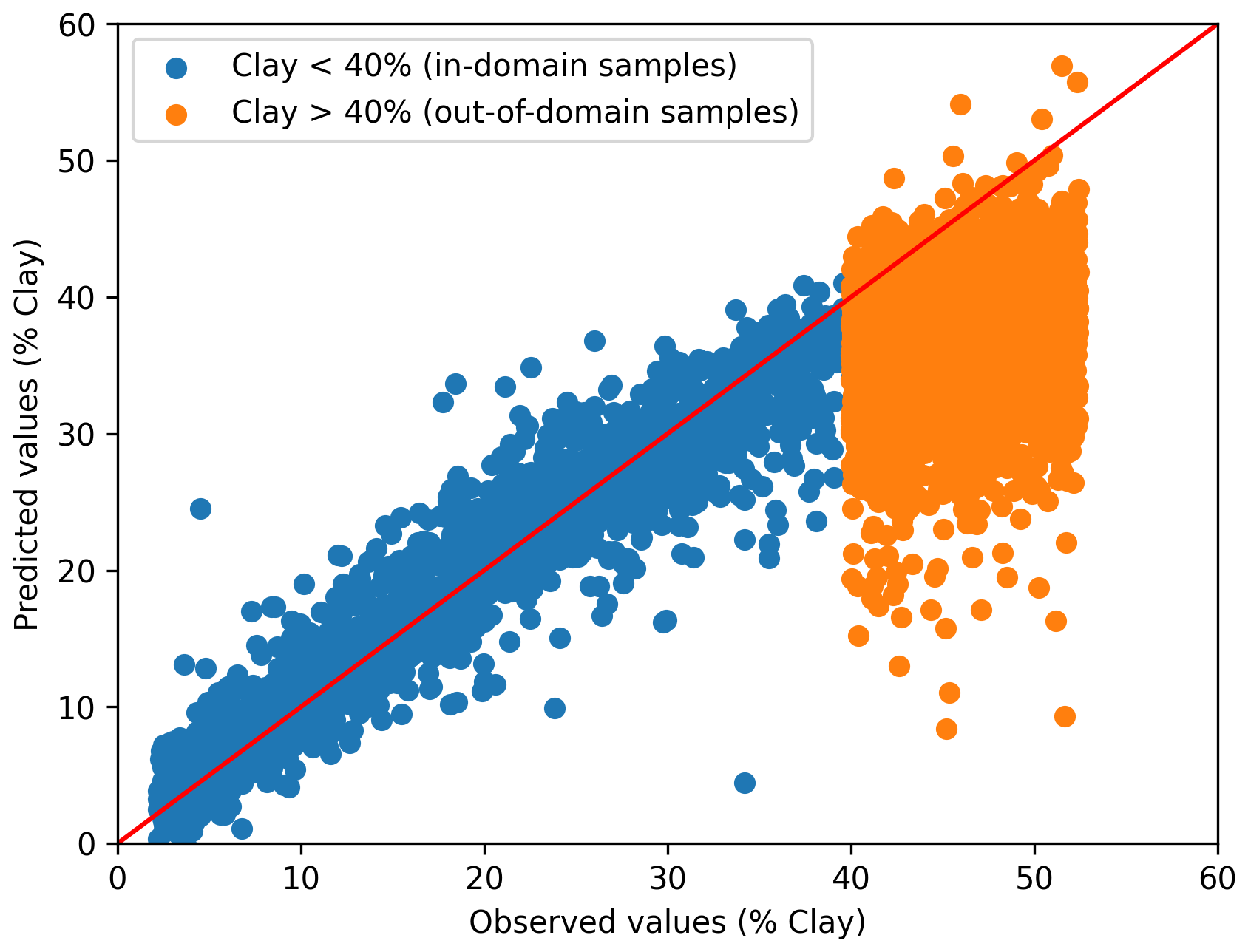
Figure 1Relationship between the observed and predicted clay content (%) of the convolutional neural network model for the in-domain test set and out-of-domain samples.
Table 3Results of the convolutional neural network modelling. R2 stands for the coefficient of determination, and RMSE stands for the root mean square error.
3.2 Uncertainty quantification
Uncertainty quantification serves as a means of evaluating prediction intervals. When a model predicts with higher uncertainty (in the case of out-of-domain samples), the models are expected to generate a wider MPIW to indicate their lack of knowledge. Padarian et al. (2022) demonstrated that MC dropout possessed the ability to “know what they know” and produced prediction intervals for out-of-domain samples that were 5 times larger than in-domain samples.
Prediction intervals were generated by making 100 predictions of each sample (Fig. 2), and PICP refers to the probability of this interval covering the observed value. The expected coverage of a p % prediction interval is p %, which is indicated by the dotted line in Fig. 3 (Shrestha and Solomatine, 2006). In the current study, the MC dropout continuously underestimated the uncertainty through all prediction intervals (Fig. 3). This trend was similar to the finding of Padarian et al. (2022). In contrast, the PICP values of CP and MC-CP for in-domain samples were both close to the expected coverage (Fig. 3). This is attributed to the guaranteed-coverage features of CP, and MC-CP provides an augmented effect. However, the PICP for out-of-domain samples was low. This was because the CNN model lacked information about the out-of-domain samples.
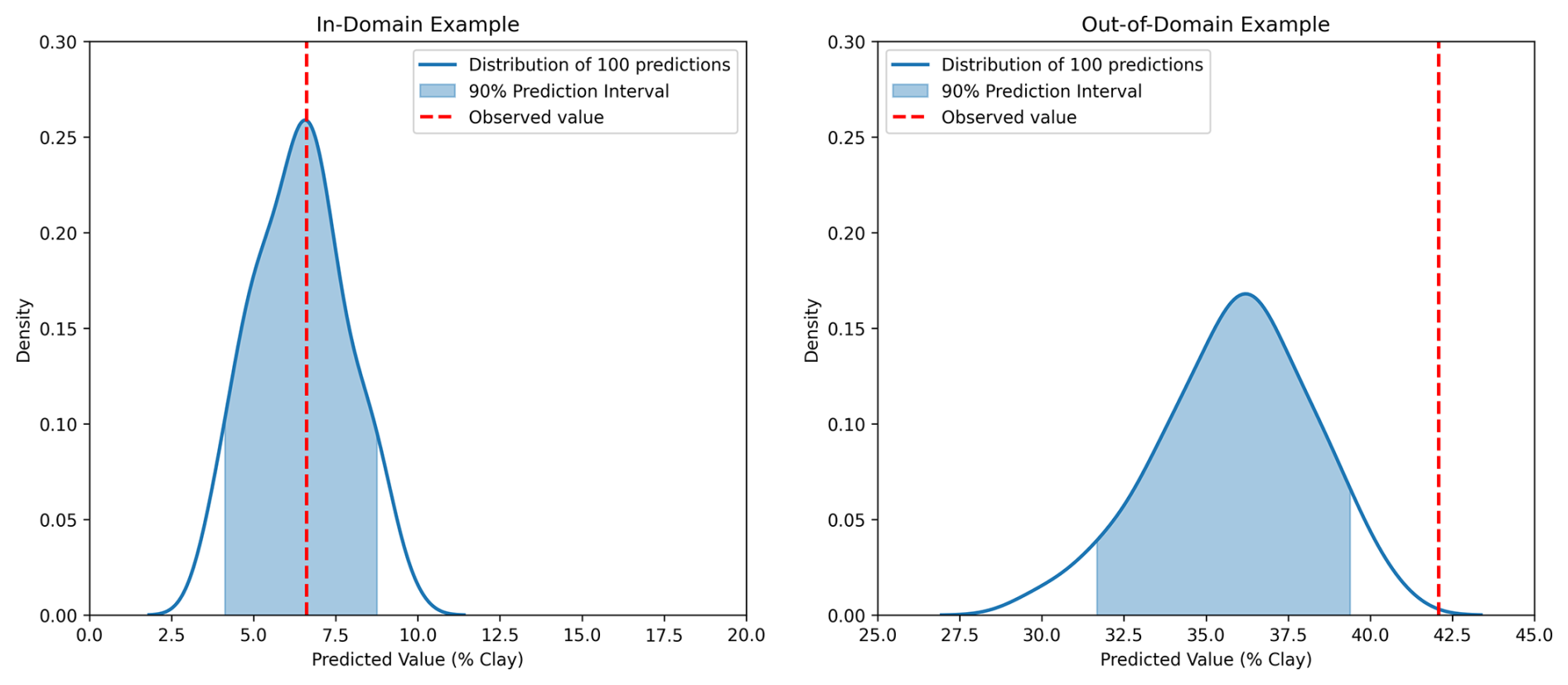
Figure 2Examples of the distribution of 100 predictions for an in-domain sample and an out-of-domain sample using MC dropout. The shaded areas are the 90 % prediction interval. The 90 % prediction interval of the in-domain example covered the observed value, while the 90 % prediction interval of the out-of-domain example did not cover the observed value.
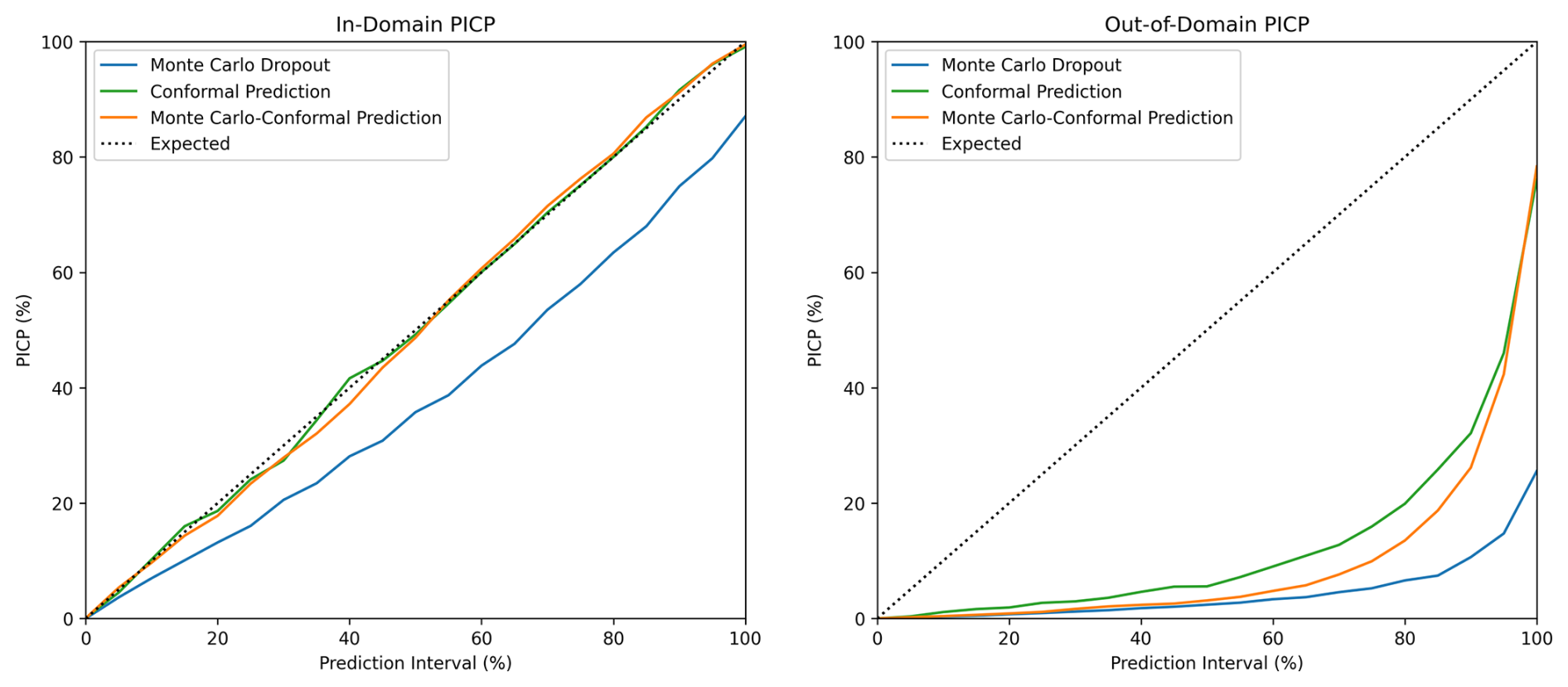
Figure 3Prediction interval coverage probability (PICP) of in-domain and out-of-domain samples at different prediction intervals for Monte Carlo dropout, conformal prediction, and Monte Carlo conformal prediction.
For the 90 % prediction intervals, the MC dropout method achieved 74 % coverage for the in-domain samples (Table 4), indicating an overconfident interval. The MPIW of MC dropout for the in-domain testing samples was 5.56 %, the narrowest of all three methods (Table 4). This is further supported by the distribution of MPIW in Fig. 4. When encountering the out-of-domain samples, the MPIW of MC dropout was 6.93 %, i.e. 25 % higher than the MPIW of the in-domain samples. This demonstrated the ability of MC dropout to generate wider intervals when encountering samples they are not familiar with (Padarian et al., 2022). However, the extended MPIW was insufficient for fully addressing the differences between out-of-domain samples and in-domain training samples, and the 90 % PICP for MC dropout was only 11 %.
Table 4Results of uncertainty quantification by Monte Carlo dropout, conformal prediction, and Monte Carlo conformal prediction. PICP stands for prediction interval coverage probability, and MPIW stands for mean prediction interval width.

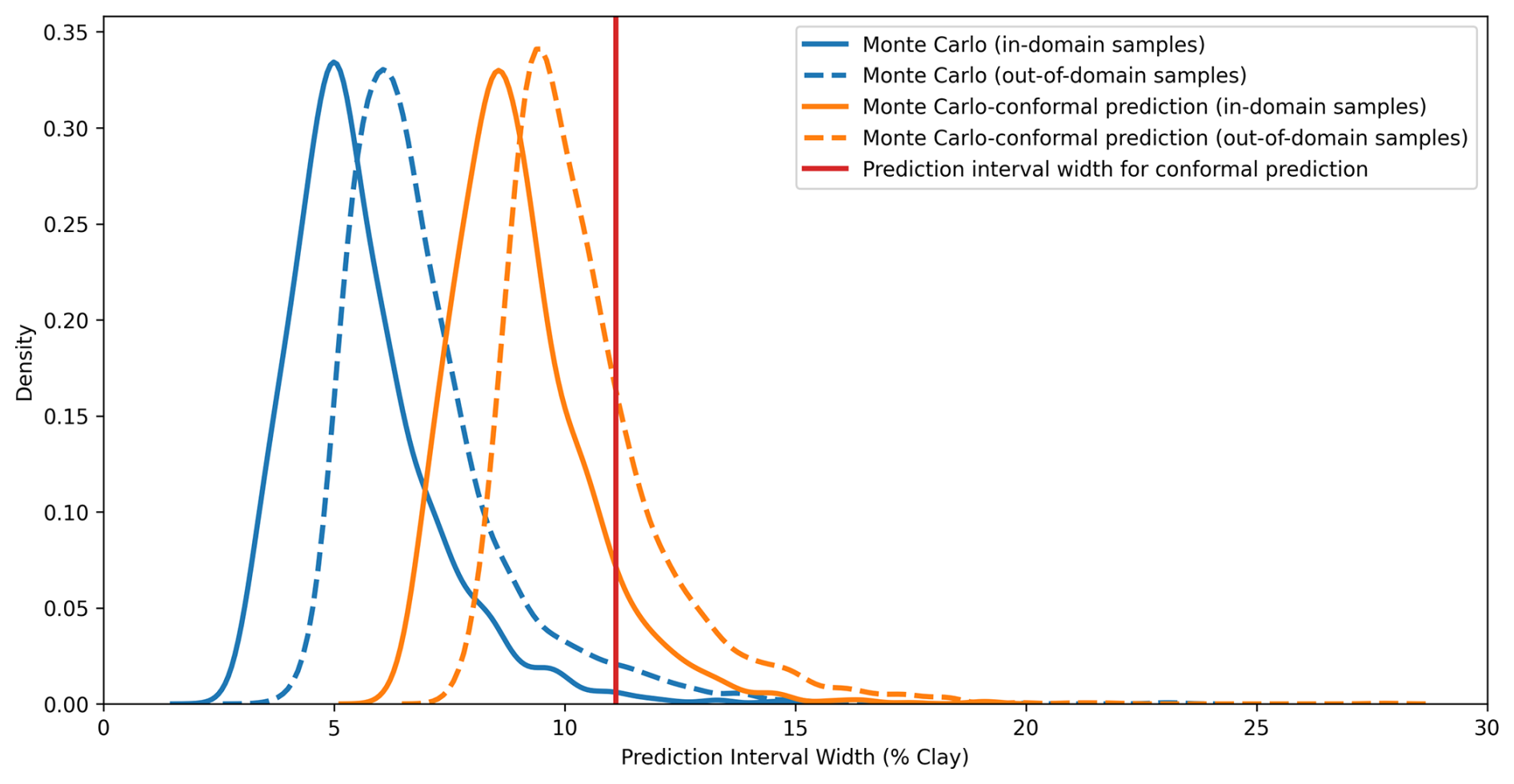
Figure 4Distribution of the prediction interval widths of Monte Carlo dropout, conformal prediction, and Monte Carlo conformal prediction for in-domain and out-of-domain samples.
On the other hand, both CP and MC-CP were able to achieve a coverage of 91 % (Fig. 3; Table 4) from the expected coverage of 90 %. This implied that 91 % of the prediction interval contained the true observed clay content, making the prediction interval reliable. However, the MPIWs of CP and MC-CP were higher than those of MC, indicating a trade-off between narrower intervals and coverage. The MPIW of CP (11.11 %) was the largest of the three methods, twice that of MC dropout (5.56 %) (Fig. 4; Table 4), making it overly conservative. Additionally, the interval of CP was constant, which prohibited CP from addressing the different uncertainties as guaranteed coverage was the main objective of this method. In other words, CP generated wide prediction intervals that were unnecessary.
The MC-CP method achieved a balance between MC dropout and CP, which produced an MPIW between MC dropout and CP while still reaching the expected coverage. The MPIW of MC-CP was 9.05 %, which was 1.6 times the MPIW of MC (Table 4) but achieved 91 % coverage from the expected coverage of 90 %. Additionally, MC-CP retained the ability to address the uncertainty of out-of-domain samples, as the MPIW for out-of-domain samples (10.43 %) was larger than the MPIW for in-domain samples (9.05 %) (Fig. 4; Table 4). Hence, MC-CP is an adequate compromise between (1) coverage of observed values, (2) addressing out-of-domain uncertainty, and (3) a reasonably sized MPIW.
However, when facing out-of-domain samples, MC-CP achieved only 26 % coverage in the 90 % prediction interval. The MPIW for out-of-domain samples (10.43 %) was 1.38 higher than that for in-domain samples (9.05 %), representing a 15 % increase in the width. The difference was insufficient to fully account for out-of-domain uncertainty, leading to the low coverage. Similarly, Liu et al. (2021) found that Bayesian neural networks and MC dropout were unable to assign high uncertainty to out-of-domain samples, indicating overconfidence in predicting unknown data. Zadorozhny et al. (2021) also highlighted the tendency of neural networks to overgeneralise from training data when predicting out-of-domain samples, potentially leading to overconfidence. When out-of-domain sample inputs closely resemble in-domain sample inputs, MC dropout may assign similar confidence levels to out-of-domain samples, failing to capture the true uncertainty. The MIR spectra of clayey soils were not as distinct from those of sandy soils as the spectra of high-SOC soils were from low-SOC soils (Ng et al., 2022; Zhang et al., 2022). For example, peaks at 2930–2850 cm−1 serve as a distinction between mineral soils and organic soils (Tinti et al., 2015; Ng et al., 2022). Thus, the difference between the MPIW of in-domain and out-of-domain samples was not as significant as in the study of Padarian et al. (2022), in which 20 % SOC was used as the separation between in-domain and out-of-domain samples.
3.3 Limitations and future applications
The MC-CP method was able to quantify the uncertainty and generate prediction intervals with sufficient coverage of true values. However, one obvious difference between MC-CP and MC is that MC-CP requires calibration samples to establish nonconformity scores. However, only a small number of calibration samples was required compared to the training samples, which can be easily achieved by dividing a portion of the training sample. For instance, the size of the calibration set in the MC-CP regression example presented by Bethell et al. (2024) was only 2 % of the testing samples. Future studies could explore the determination of the optimal size of the calibration sets. Another potential enhancement of CP is the use of clustering to assign different PIWs to distinct groups. For example, Malone et al. (2011) applied fuzzy clustering prior to implementing UNEEC, which is similar to CP in calculation. With this means, the out-of-domain samples can be addressed by introducing an extra-grade cluster. Additionally, asymmetric PIWs, where the upper and lower bounds differ in width, could be explored in the MC-CP framework to account for potential imbalance in prediction errors.
While CP is model-agnostic, MC dropout is restricted to deep neural networks since it requires the inclusion of dropout layers in the model architecture (Gal and Ghahramani, 2016). Hence, MC-CP is also model-specific and can only be used on deep neural networks. Neural networks have been widely applied in soil spectroscopy, with several studies reporting accurate prediction results (Ng et al., 2019; Padarian et al., 2019; Javadi et al., 2021). MC-CP offers a reliable method for generating prediction uncertainty without the computational burden associated with the Bayesian approach. Future investigations should compare these uncertainty quantification methods in terms of computational efficiency and MPIW.
Schmidinger and Heuvelink (2023) raised the issue of PICP ignoring the one-sided bias in prediction, in which 90 % of the interval covers the observed value but the probability outside the boundaries is asymmetrically distributed. Other parameters, such as quantile coverage probability and probability integral transform, are thus needed to evaluate the uncertainty quantification in the future. In the present study, out-of-domain samples exhibited a higher clay content than in-domain samples, with the predicted values tending to be lower than the real value (Fig. 1). Consequently, observed values were more frequently above the 95 % quantile of the prediction distribution, as illustrated by the out-of-domain example in Fig. 2. This one-sided bias arises from the separation of out-of-domain samples.
The efficiency allows MC-CP to be applied to large models such as soil inference systems (McBratney et al., 2002), in which multiple pedotransfer functions are coupled together to predict complicated soil properties using basic soil properties that can be assessed by soil spectroscopy. Adding uncertainty analysis to model evaluation will increase the practicality of models and bring them one step closer to real-world applications.
The study aimed to assess the uncertainty in predicting clay content using convolutional neural networks through three uncertainty quantification techniques: Monte Carlo (MC) dropout, conformal prediction (CP), and MC-CP. The mid-infrared (MIR) spectra from the KSSL database were divided into two categories:
-
in-domain samples and
-
out-of-domain samples: this division tested the model's ability to handle samples that differ significantly from the training data.
The following methods were compared.
-
MC dropout:
- -
This produced the lowest prediction interval coverage probability (PICP).
- -
It generated the narrowest mean prediction interval width (MPIW), indicating overconfidence in predictions.
- -
-
Conformal prediction (CP):
- -
This achieved the ideal PICP but had a fixed MPIW and the largest MPIW among the methods.
- -
-
MC-CP:
- -
This balanced the strengths of the other methods, achieving 91 % PICP (for a 90 % expected PICP) with a moderate MPIW.
- -
The advantages of MC-CP are as follows:
-
It provides a balance between MC dropout and CP.
-
It exhibits
- 1.
a high coverage probability of true values,
- 2.
variable prediction intervals that adapt to out-of-domain samples, and
- 3.
a moderate MPIW for balanced uncertainty representation.
- 1.
The main implications are as follows:
-
MC-CP demonstrates the potential for quantifying uncertainty in DL models for soil property prediction.
-
The method allows for computationally efficient uncertainty quantification and production of prediction intervals that reliably cover the true values.
Future directions:
-
Integration of MC-CP into large-scale prediction systems, such as soil inference models, to enhance prediction accuracy and support decision making in real-world applications.
The data used in this study are owned and managed by the National Soil Survey Center of the Kellogg Soil Survey Laboratory (KSSL). Interested parties should contact the KSSL directly to request access, in accordance with their data-sharing policies. The code used to perform MC-CP in this study is available via a GitHub repository (https://doi.org/10.5281/zenodo.15401499, Huang, 2025, and https://github.com/LloydYCHuang/Soil-MC-CP, last access: 18 July 2025).
YCH: conceptualisation, data curation, formal analysis, investigation, visualisation, writing – original draft preparation. JP: conceptualisation, supervision, writing – review and editing. BM: supervision, writing – review and editing. ABM: supervision, writing – review and editing.
The contact author has declared that none of the authors has any competing interests.
Publisher’s note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors.
The authors thank the staff at the National Soil Survey Center of the Kellogg Soil Survey Laboratory (Lincoln, NE), who collected and analysed the soil samples in the KSSL dataset. We would like to thank the authors of Bethell et al. (2024), especially Daniel Bethell, for providing the original code of the MC-CP. The study was funded by a National Soil Carbon Innovation Challenge – Development and Demonstration Round 2 grant: an integrated schema for soil carbon stock estimation and crediting.
This research has been supported by the Department of Climate Change, Energy, the Environment and Water (an integrated schema for soil carbon stock estimation and crediting).
This paper was edited by Pedro Batista and reviewed by Jonas Schmidinger and Kerstin Rau.
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z., Citro, C., Corrado, G. S., Davis, A., Dean, J., Devin, M., Ghemawat, S., Goodfellow, I., Harp, A., Irving, G., Isard, M., Jia, Y., Jozefowicz, R., Kaiser, L., Kudlur, M., Levenberg, J., Mané, D., Monga, R., Moore, S., Murray, D., Olah, C., Schuster, M., Shlens, J., Steiner, B., Sutskever, I., Talwar, K., Tucker, P., Vanhoucke, V., Vasudevan, V., Viégas, F., Vinyals, O., Warden, P., Wattenberg, M., Wicke, M., Yu, Y., and Zheng, X.: TensorFlow: large-scale machine learning on heterogeneous systems, arXiv, https://www.tensorflow.org/ (last access: 18 July 2025), 2015.
Angelopoulos, A. N. and Bates, S.: A Gentle Introduction to Conformal Prediction and Distribution-Free Uncertainty Quantification, arXiv [preprint], https://doi.org/10.48550/arXiv.2107.07511, 2022.
Begoli, E., Bhattacharya, T., and Kusnezov, D.: The need for uncertainty quantification in machine-assisted medical decision making, Nat. Mach. Intell., 1, 20–23, https://doi.org/10.1038/s42256-018-0004-1, 2019.
Bellon-Maurel, V., Fernandez-Ahumada, E., Palagos, B., Roger, J.-M., and McBratney, A.: Critical review of chemometric indicators commonly used for assessing the quality of the prediction of soil attributes by NIR spectroscopy, TrAC, Trends Anal. Chem., 29, 1073–1081, https://doi.org/10.1016/j.trac.2010.05.006, 2010.
Bethell, D., Gerasimou, S., and Calinescu, R.: Robust Uncertainty Quantification Using Conformalised Monte Carlo Prediction, Proceedings of the AAAI Conference on Artificial Intelligence, 38, 20939–20948, https://doi.org/10.1609/aaai.v38i19.30084, 2024.
Efron, B. and Tibshirani, R. J.: An Introduction to the Bootstrap, Chapman and Hall/CRC, New York, NY, https://doi.org/10.1201/9780429246593, 1994.
Gal, Y. and Ghahramani, Z.: Dropout as a Bayesian Approximation: Representing Model Uncertainty in Deep Learning, Proceedings of the 33rd International Conference on Machine Learning, 48, 1050–1059, https://proceedings.mlr.press/v48/gal16.html, 2016.
Heuvelink, G. B.: Uncertainty quantification of GlobalSoilMap products, in: GlobalSoilMap. Basis of the Global Spatial Soil Information System, edited by: Arrouays, D., McKenzie, N., Hempel, J., Richer de Forges, A., and McBratney, A., CRC Press, 335–340, https://doi.org/10.1201/b16500, 2014.
Heuvelink, G. B. M., Angelini, M. E., Poggio, L., Bai, Z., Batjes, N. H., van den Bosch, R., Bossio, D., Estella, S., Lehmann, J., Olmedo, G. F., and Sanderman, J.: Machine learning in space and time for modelling soil organic carbon change, Eur. J. Soil Sci., 72, 1607–1623, https://doi.org/10.1111/ejss.12998, 2021.
Huang, L.: LloydYCHuang/Soil-MC-CP: v1.0.1, Zenodo [code], https://doi.org/10.5281/zenodo.15401499, 2025.
Javadi, S. H., Munnaf, M. A., and Mouazen, A. M.: Fusion of Vis-NIR and XRF spectra for estimation of key soil attributes, Geoderma, 385, 114851, https://doi.org/10.1016/j.geoderma.2020.114851, 2021.
Kakhani, N., Alamdar, S., Kebonye, N. M., Amani, M., and Scholten, T.: Uncertainty Quantification of Soil Organic Carbon Estimation from Remote Sensing Data with Conformal Prediction, Remote Sens., 16, 438, https://doi.org/10.3390/rs16030438, 2024.
Kasraei, B., Heung, B., Saurette, D. D., Schmidt, M. G., Bulmer, C. E., and Bethel, W.: Quantile regression as a generic approach for estimating uncertainty of digital soil maps produced from machine-learning, Environ. Modell. Softw., 144, 105139, https://doi.org/10.1016/j.envsoft.2021.105139, 2021.
Liu, Y., Pagliardini, M., Chavdarova, T., and Stich, S. U.: The Peril of Popular Deep Learning Uncertainty Estimation Methods, Proceedings of the Bayesian Deep Learning workshop, virtual, 14 December 2021, NeurIPS 2021, https://doi.org/10.48550/arXiv.2112.05000, 2021.
Malone, B. P., McBratney, A. B., and Minasny, B.: Empirical estimates of uncertainty for mapping continuous depth functions of soil attributes, Geoderma, 160, 614–626, https://doi.org/10.1016/j.geoderma.2010.11.013, 2011.
McBratney, A. B., Minasny, B., Cattle, S. R., and Vervoort, R. W.: From pedotransfer functions to soil inference systems, Geoderma, 109, 41–73, https://doi.org/10.1016/S0016-7061(02)00139-8, 2002.
Minasny, B., Vrugt, J. A., and McBratney, A. B.: Confronting uncertainty in model-based geostatistics using Markov Chain Monte Carlo simulation, Geoderma, 163, 150–162, https://doi.org/10.1016/j.geoderma.2011.03.011, 2011.
Minasny, B., Bandai, T., Ghezzehei, T. A., Huang, Y.-C., Ma, Y., McBratney, A. B., Ng, W., Norouzi, S., Padarian, J., Rudiyanto, Sharififar, A., Styc, Q., and Widyastuti, M.: Soil Science-Informed Machine Learning, Geoderma, 452, 117094, https://doi.org/10.1016/j.geoderma.2024.117094, 2024.
Ng, W., Minasny, B., Jeon, S. H., and McBratney, A.: Mid-infrared spectroscopy for accurate measurement of an extensive set of soil properties for assessing soil functions, Soil Secur., 6, 100043, https://doi.org/10.1016/j.soisec.2022.100043, 2022.
Ng, W., Minasny, B., Montazerolghaem, M., Padarian, J., Ferguson, R., Bailey, S., and McBratney, A. B.: Convolutional neural network for simultaneous prediction of several soil properties using visible/near-infrared, mid-infrared, and their combined spectra, Geoderma, 352, 251–267, https://doi.org/10.1016/j.geoderma.2019.06.016, 2019.
Omondiagbe, O. P., Roudier, P., Lilburne, L., Ma, Y., and McNeill, S.: Quantifying uncertainty in the prediction of soil properties using mid-infrared spectra, Geoderma, 448, 116954, https://doi.org/10.1016/j.geoderma.2024.116954, 2024.
Padarian, J., Minasny, B., and McBratney, A. B.: Using deep learning to predict soil properties from regional spectral data, Geoderma Reg., 16, e00198, https://doi.org/10.1016/j.geodrs.2018.e00198, 2019.
Padarian, J., Minasny, B., and McBratney, A. B.: Machine learning and soil sciences: a review aided by machine learning tools, Soil, 6, 35–52, https://doi.org/10.5194/soil-6-35-2020, 2020.
Padarian, J., Minasny, B., and McBratney, A. B.: Assessing the uncertainty of deep learning soil spectral models using Monte Carlo dropout, Geoderma, 425, 116063, https://doi.org/10.1016/j.geoderma.2022.116063, 2022.
Python Software Foundation: Python Language Reference, version 3.12.3. https://www.python.org (last access: 18 July 2025), 2024.
Schmidinger, J. and Heuvelink, G. B. M.: Validation of uncertainty predictions in digital soil mapping, Geoderma, 437, 116585, https://doi.org/10.1016/j.geoderma.2023.116585, 2023.
Seybold, C. A., Ferguson, R., Wysocki, D., Bailey, S., Anderson, J., Nester, B., Schoeneberger, P., Wills, S., Libohova, Z., Hoover, D., and Thomas, P.: Application of Mid-Infrared Spectroscopy in Soil Survey, Soil Sci. Soc. Am. J., 83, 1746–1759, https://doi.org/10.2136/sssaj2019.06.0205, 2019.
Shafer, G. and Vovk, V.: A tutorial on conformal prediction, J. Mach. Learn. Res., 9, 371–421, https://doi.org/10.48550/arXiv.0706.3188, 2008.
Shrestha, D. L. and Solomatine, D. P.: Machine learning approaches for estimation of prediction interval for the model output, Neural Networks, 19, 225–235, https://doi.org/10.1016/j.neunet.2006.01.012, 2006.
Singh, G., Moncrieff, G., Venter, Z., Cawse-Nicholson, K., Slingsby, J., and Robinson, T. B.: Uncertainty quantification for probabilistic machine learning in earth observation using conformal prediction, Sci. Rep., 14, 16166, https://doi.org/10.1038/s41598-024-65954-w, 2024.
Soil Science Division Staff: Soil survey manual, in: USDA Handbook 18, edited by: Ditzler, C., Scheffe, K., and Monger, H. C., Government Printing Office, https://www.nrcs.usda.gov/resources/guides-and-instructions/soil-survey-manual (last access: 18 July 2025), 2017.
Soil Survey Staff: Kellogg soil survey laboratory methods manual, Soil Survey Investigations Report No. 42, N. R. C. S. United States Department of Agriculture, https://www.nrcs.usda.gov/sites/default/files/2023-01/SSIR42.pdf (last access: 18 July 2025), 2014.
Solomatine, D. P. and Shrestha, D. L.: A novel method to estimate model uncertainty using machine learning techniques, Water Resour. Res., 45, W00B11, https://doi.org/10.1029/2008WR006839, 2009.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I., and Salakhutdinov, R.: Dropout: A Simple Way to Prevent Neural Networks from Overfitting, J. Mach. Learn. Res., 15, 1929–1958, 2014.
Tinti, A., Tugnoli, V., Bonora, S., and Francioso, O.: Recent applications of vibrational mid-Infrared (IR) spectroscopy for studying soil components: a review, J. Cent. Eur. Agric., 16, 1–22, https://doi.org/10.5513/JCEA01/16.1.1535, 2015.
Wadoux, A. M. J. C.: Using deep learning for multivariate mapping of soil with quantified uncertainty, Geoderma, 351, 59–70, https://doi.org/10.1016/j.geoderma.2019.05.012, 2019.
Wadoux, A. M. J. C., Minasny, B., and McBratney, A. B.: Machine learning for digital soil mapping: Applications, challenges and suggested solutions, Earth-Sci. Rev., 210, 103359, https://doi.org/10.1016/j.earscirev.2020.103359, 2020.
Zadorozhny, K., Ulmer, D., and Cinà, G.: Failures of Uncertainty Estimation on Out-Of-Distribution Samples: Experimental Results from Medical Applications Lead to Theoretical Insights, Proceedings of the ICML 2021 Workshop on Uncertainty and Robustness in Deep Learning, virtual, 23 July 2021, https://www.gatsby.ucl.ac.uk/~balaji/udl2021/accepted-papers/UDL2021-paper-020.pdf (last access: 18 July 2025), 2021.
Zhang, Y., Freedman, Z. B., Hartemink, A. E., Whitman, T., and Huang, J.: Characterizing soil microbial properties using MIR spectra across 12 ecoclimatic zones (NEON sites), Geoderma, 409, 115647, https://doi.org/10.1016/j.geoderma.2021.115647, 2022.